Post Syndicated from Matt Richardson original https://www.raspberrypi.org/blog/openrov-underwater-exploration-with-raspberry-pi/
There are plenty of Raspberry Pis doing good work in various unusual environments, from monitoring penguins in the extreme cold of Antarctica to running schoolchildren’s programs in the earth’s orbit. Thanks to OpenROV, we can add ‘exploring the briny deep’ to that list.
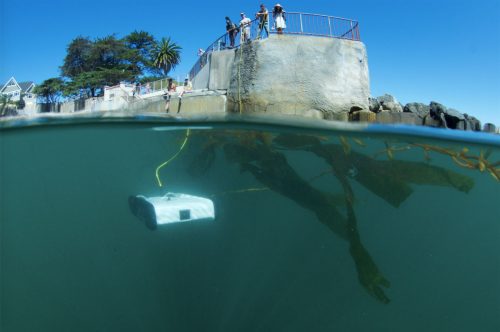
The California-based company’s newest product, Trident, is an affordable underwater drone built with hackability in mind. OpenROV raised over $815,000 on Kickstarter for Trident, an entirely new product to follow their popular OpenROV 2.8 underwater drone. All of us are especially excited about Trident because there’s a Raspberry Pi 3 inside. In a recent update to their backers, they shared the news:
Just after the Raspberry Pi 3 was announced, we began to research whether it would be possible to port our existing OpenROV software over to the Pi. After some final testing last month, including testing done during our Tahoe expedition, we made the decision to move our system over to the new architecture, and we couldn’t be happier. Having multiple cores gives Trident much better video and data processing capabilities, which will continue to come in handy as we release software updates. The built-in features will make the entire system more solid from the get-go. Moreover, Trident will be (in our opinion, at least) one of the coolest devices that uses the Raspberry Pi. We’ve designed the Trident software to include an integrated development environment, so people wanting to write their own plugins and modifications can edit their code directly on the vehicle through their web browser, with no additional software needed. Fueling a strong developer community has always been core to OpenROV, and we think our integration of the Raspberry Pi 3 will move us even further in that direction.
I found myself mesmerised watching this video of how beautifully Trident flies underwater. Take a look for yourself:
OpenROV Haxpedition 2016: Trident Testing
This is a compilation video from our testing of Trident in Lake Tahoe in June 2016. Learn more: http://www.openrov.com/
I asked Eric Stackpole, one of OpenROV’s co-founders, why wireless LAN is useful if it doesn’t work through water. He said:
The Pi 3’s WiFi has been invaluable because we needed a simple way to talk to external payloads, without requiring soldering or specialised waterproof connectors. WiFi allows us to establish a high-speed connection with many off-the-shelf WiFi-enabled devices, such as GoPro cameras, 360 cameras, and IoT devices, as well as user-made payloads that can be connected to a WiFi module. Radio doesn’t travel very far through water but since payloads are physically attached to the vehicle, that creates a conduit in the insulating material through which the signal can travel. We wanted to create a user interface that was isolated from the vehicle electronics so that no matter what happens to the payload, the vehicle will continue to work reliably. We’ve been really happy with this system so far, and we’re excited to start designing more payloads for it soon. We’ll also publish more about the software plugin architecture soon.
For Trident users, being able to dig deep into the software makes their product especially extensible. And in a big win for our community, Trident’s software suite builds on top of Raspbian. The OpenROV team installs some of their own software such as OpenROV Cockpit, then adds some Debian packages and a few device tree overlays which allow the Raspberry Pi to interface with their controller board.

At the Raspberry Pi Foundation, we love how digital making isn’t just for those interested in computing itself. Computers are an empowering material for allowing people to explore their passions through programming and making. OpenROV’s Trident sits perfectly at the intersection of computing and underwater exploration. So it just might be the perfect thing for a budding Jacques Cousteau.
The post OpenROV: Underwater Exploration with Raspberry Pi appeared first on Raspberry Pi.